- Süsteemid m lineaarvõrrandid n teadmata.
Lineaarvõrrandisüsteemi lahendamine- see on selline numbrite komplekt ( x 1, x 2, …, x n), kui see asendatakse süsteemi igas võrrandis, saadakse õige võrdsus.
Kus aij, i = 1, …, m; j = 1, …, n— süsteemi koefitsiendid;
b i , i = 1, …, m- vabaliikmed;
x j , j = 1, …, n- teadmata.
Ülaltoodud süsteemi saab kirjutada maatriksi kujul: A X = B,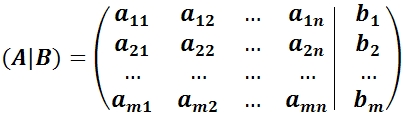
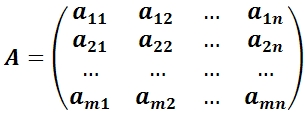

Kus ( A|B) on süsteemi põhimaatriks;
A— laiendatud süsteemimaatriks;
X— tundmatute veerg;
B— vabaliikmete kolonn.
Kui maatriks B ei ole nullmaatriks ∅, siis nimetatakse seda lineaarvõrrandisüsteemi ebahomogeenseks.
Kui maatriks B= ∅, siis nimetatakse seda lineaarvõrrandisüsteemi homogeenseks. Homogeensel süsteemil on alati null (triviaalne) lahendus: x 1 = x 2 = …, x n = 0.
Lineaarvõrrandi süsteem on lineaarvõrrandi süsteem, millel on lahendus.
Ebaühtlane lineaarvõrrandisüsteem on lahendamatu lineaarvõrrandi süsteem.
Teatud lineaarvõrrandisüsteem- omab ainus otsus lineaarvõrrandi süsteem.
Määramatu lineaarvõrrandi süsteem on lõpmatu arvu lahendustega lineaarvõrrandi süsteem. - n lineaarvõrrandi süsteemid n tundmatuga
Kui tundmatute arv on võrdne võrrandite arvuga, on maatriks ruut. Maatriksi determinanti nimetatakse lineaarvõrrandisüsteemi peamiseks determinandiks ja seda tähistatakse sümboliga Δ.
Crameri meetod süsteemide lahendamiseks n lineaarvõrrandid n teadmata.
Crameri reegel.
Kui lineaarvõrrandisüsteemi põhideterminant ei ole võrdne nulliga, on süsteem järjekindel ja defineeritud ning ainus lahendus arvutatakse Crameri valemite abil:
kus Δ i on determinandid, mis on saadud süsteemi peadeterminandist Δ asendamise teel i veerust vabaliikmete veergu. . - M lineaarvõrrandi süsteemid n tundmatuga
Kronecker-Capelli teoreem.
Et antud lineaarvõrrandisüsteem oleks järjepidev, on vajalik ja piisav, et süsteemimaatriksi auaste oleks võrdne süsteemi laiendatud maatriksi astmega, helin(Α) = helin(Α|B).
Kui helin(Α) ≠ helin(Α|B), siis pole süsteemil ilmselgelt lahendusi.
Kui helin(Α) = helin(Α|B), siis on võimalikud kaks juhtumit:
1) aste(Α) = n(tundmatute arv) - lahendus on ainulaadne ja selle saab Crameri valemite abil;
2) auaste (Α)< n - lahendusi on lõputult palju. - Gaussi meetod lineaarvõrrandisüsteemide lahendamiseks
Loome laiendatud maatriksi ( A|B) antud süsteemi tundmatute ja parempoolsete koefitsientide põhjal.
Gaussi meetod ehk tundmatute elimineerimise meetod seisneb laiendatud maatriksi ( A|B) kasutades elementaarteisendusi üle oma ridade diagonaalkujule (ülemisele kolmnurksele kujule). Tulles tagasi võrrandisüsteemi juurde, on kõik tundmatud määratud.
Elementaarsed teisendused stringide üle hõlmavad järgmist:
1) vahetada kaks rida;
2) stringi korrutamine 0-st erineva arvuga;
3) stringile teise stringi lisamine, mis on korrutatud suvalise arvuga;
4) nulljoone väljaviskamine.
Laiendatud maatriks, mis on taandatud diagonaalseks vormiks, vastab lineaarne süsteem, samaväärne sellega, mille lahendamine raskusi ei tekita. . - Homogeensete lineaarvõrrandite süsteem.
Homogeensel süsteemil on vorm:
see vastab maatriksvõrrandile A X = 0.
1) Homogeenne süsteem on alati järjepidev, kuna r(A) = r(A|B), on alati olemas nulllahendus (0, 0, …, 0).
2) Et homogeensel süsteemil oleks nullist erinev lahendus, on vajalik ja piisav, et r = r(A)< n , mis võrdub Δ = 0.
3) Kui r< n , siis ilmselgelt Δ = 0, siis tekivad vabad tundmatud c1, c2, …, cn-r, on süsteemil mittetriviaalsed lahendused ja neid on lõpmatult palju.
4) Üldine lahendus X juures r< n saab kirjutada maatriksi kujul järgmiselt:
X = c 1 X 1 + c 2 X 2 + … + c n-r X n-r,
kus on lahendused X 1, X 2, …, X n-r moodustavad põhimõttelise lahenduste süsteemi.
5) Lahenduste põhisüsteemi saab hankida üldine lahendus homogeenne süsteem: ,
,
kui seame parameetrite väärtused järjestikku võrdseks (1, 0, …, 0), (0, 1, …, 0), …, (0, 0, …, 1).
Üldlahenduse laiendamine põhilahenduste süsteemi osas on üldlahenduse kirje põhisüsteemi kuuluvate lahenduste lineaarse kombinatsioonina.
Teoreem. Selleks, et lineaarsete homogeensete võrrandite süsteemil oleks nullist erinev lahendus, on vajalik ja piisav, et Δ ≠ 0.
Seega, kui determinant Δ ≠ 0, siis on süsteemil ainulaadne lahendus.
Kui Δ ≠ 0, siis on lineaarsete homogeensete võrrandite süsteemil lõpmatu arv lahendeid.
Teoreem. Selleks, et homogeensel süsteemil oleks nullist erinev lahendus, on vajalik ja piisav, et r(A)< n .
Tõestus:
1) r rohkem ei saa olla n(maatriksi järjestus ei ületa veergude või ridade arvu);
2) r< n , sest Kui r = n, siis süsteemi põhideterminant Δ ≠ 0 ja Crameri valemite järgi on olemas ainulaadne triviaalne lahendus x 1 = x 2 = … = x n = 0, mis on tingimusega vastuolus. Tähendab, r(A)< n .
Tagajärg. Homogeense süsteemi nimel n lineaarvõrrandid n Tundmatutel oli nullist erinev lahendus, on vajalik ja piisav, et Δ = 0.
RCB KAITSE SÕJAÜLIKOOLI KOSTROMA FILIAAL
Sõjaväe juhtimise automatiseerimise osakond
Ainult õpetajatele
"Ma kiidan heaks"
Osakonnajuhataja nr 9
Kolonel YAKOVLEV A.B.
"____"__________________ 2004
Dotsent A.I. SMIRNOVA
"KVALIFITSIOONID.
LINEAARVÕRDSÜSTEEMIDE LAHENDUS"
LOENG nr 2 / 1
Arutati osakonna koosolekul nr 9
"________"___________ 2004
Protokoll nr ___________
Kostroma, 2004.
Sissejuhatus
1. Teist ja kolmandat järku determinandid.
2. Determinantide omadused. Dekompositsiooni teoreem.
3. Crameri teoreem.
Järeldus
Kirjandus
1. V.E. Schneider et al. Lühike kursus Kõrgem matemaatika, I köide, Ch. 2 lõige 1.
2. V.S. Štšipatšov, Kõrgem matemaatika, 10. peatükk, lõik 2.
SISSEJUHATUS
Loengus käsitletakse teise ja kolmanda järgu determinante ja nende omadusi. Ja ka Crameri teoreem, mis võimaldab determinantide abil lahendada lineaarvõrrandisüsteeme. Determinante kasutatakse ka hiljem teemas “Vektoralgebra” vektorite vektorkorrutise arvutamisel.
1. õppeküsimus TEISE JA KOLMANDA MÄÄRAJAD
TELLIMINE
Vaatleme vormi nelja numbriga tabelit
Tabelis olevad numbrid on tähistatud kahe indeksiga tähega. Esimene indeks tähistab rea numbrit, teine veeru numbrit.
MÄÄRATLUS 1. Teist järku determinant helistas väljendus lahke :
 (1)
(1)
Numbrid A 11, …, A 22 nimetatakse determinandi elementideks.
Elementidest moodustatud diagonaal A 11 ; A 22 nimetatakse peamiseks ja diagonaaliks, mille moodustavad elemendid A 12 ; A 21 - kõrvuti.
Seega on teist järku determinant võrdne põhi- ja sekundaardiagonaali elementide korrutistega.
Pange tähele, et vastus on arv.
NÄITED. Arvutama:

Nüüd kaaluge üheksa numbriga tabelit, mis on kirjutatud kolmes reas ja kolmes veerus:

MÄÄRATLUS 2. Kolmandat järku determinant nimetatakse vormi väljenduseks :
Elemendid A 11; A 22 ; A 33 – moodustab põhidiagonaali.
Numbrid A 13; A 22 ; A 31 – moodustada külgdiagonaal.
Kujutame skemaatiliselt, kuidas pluss- ja miinusliikmed moodustuvad:
 " + " " – "
" + " " – "
Pluss sisaldab: põhidiagonaalil olevate elementide korrutis, ülejäänud kaks liiget on põhidiagonaaliga paralleelsete alustega kolmnurkade tippudes paiknevate elementide korrutis.
Miinusliikmed moodustatakse sekundaarse diagonaali suhtes sama skeemi järgi.
Seda kolmandat järku determinandi arvutamise reeglit nimetatakse
Reegel T reugolnikov.
NÄITED. Arvutage kolmnurga reegli abil:

KOMMENTEERI. Determinante nimetatakse ka determinantideks.
2. õppeküsimus DETERMINANTIDE OMADUSED.
LAIENDATEOREEM
Vara 1. Determinandi väärtus ei muutu, kui selle read vahetatakse vastavate veergudega.
 .
.
Mõlema determinandi paljastamisega oleme veendunud võrdsuse kehtivuses.
Omadus 1 kehtestab determinandi ridade ja veergude võrdsuse. Seetõttu sõnastame determinandi kõik edasised omadused nii ridade kui ka veergude jaoks.
Vara 2. Kahe rea (või veeru) ümberpaigutamisel muudab determinant oma märgi vastupidiseks, säilitades oma absoluutväärtuse .
 .
.
Vara 3. Kokku kordaja rea elemendid (või veerus)saab välja võtta määrava märgina.
 .
.
Vara 4. Kui determinandil on kaks identset rida (või veergu), siis on see võrdne nulliga.

Seda omadust saab tõestada otsese kontrolliga või kasutada atribuuti 2.
Tähistame determinandi tähega D. Kahe identse esimese ja teise rea ümberpaigutamisel see ei muutu, kuid vastavalt teisele omadusele peab ta muutma märki, s.t.
D = - DÞ 2 D = 0 ÞD = 0.
Vara 5. Kui kõik stringi elemendid (või veerus)on nulliga, siis on determinant võrdne nulliga.
Seda vara võib pidada erijuhtum omadused 3 kl
Vara 6. Kui kahe joone elemendid (või veerud)determinandid on võrdelised, siis on determinant võrdne nulliga.
 .
.
Saab tõestada otsese kontrollimise või omaduste 3 ja 4 abil.
Vara 7. Determinandi väärtus ei muutu, kui rea (või veeru) elementidele lisatakse teise rea (või veeru) vastavad elemendid, korrutades sama arvuga.
 .
.
Tõestatud otsese kontrolliga.
Nende omaduste kasutamine võib mõnel juhul hõlbustada determinantide, eriti kolmandat järku, arvutamise protsessi.
Järgneva jaoks vajame väiksema ja algebralise täienduse mõisteid. Vaatleme neid mõisteid kolmanda järjekorra määratlemiseks.
MÄÄRATLUS 3. Alaealine Kolmandat järku determinandi antud elemendist nimetatakse teist järku determinandiks, mis saadakse antud elemendist rea ja veeru läbikriipsutamise teel, mille ristumiskohas antud element asub.
Väike element A i j tähistatud M i j. Nii et elemendi jaoks A 11 alaealine

See saadakse kolmanda järgu determinandi esimese rea ja esimese veeru läbikriipsutamisel.
MÄÄRATLUS 4. Determinandi elemendi algebraline täiend nad nimetavad seda alaealiseks korrutatuna (-1)k , Kus k - rea- ja veerunumbrite summa, mille ristumiskohas see element asub.
Elemendi algebraline täiend A i j tähistatud A i j .
Seega A i j =
.Kirjutame üles elementide algebralised liitmised A 11 ja A 12.
 .
.
.
.
Kasulik on meeles pidada reeglit: determinandi elemendi algebraline täiend on võrdne selle märgilise molliga pluss, kui rea- ja veerunumbrite summa, milles element kuvatakse, on isegi, ja märgiga miinus, kui see summa kummaline .
RCB KAITSE SÕJAÜLIKOOLI KOSTROMA FILIAAL
Sõjaväe juhtimise automatiseerimise osakond
Ainult õpetajatele
"Ma kiidan heaks"
Osakonnajuhataja nr 9
Kolonel YAKOVLEV A.B.
"____"__________________ 2004
Dotsent A.I. SMIRNOVA
"KVALIFITSIOONID.
LINEAARVÕRDSÜSTEEMIDE LAHENDUS"
LOENG nr 2 / 1
Arutati osakonna koosolekul nr 9
"________"___________ 2004
Protokoll nr ___________
Kostroma, 2004.
Sissejuhatus
Teise ja kolmanda järgu määrajad.
Determinantide omadused. Dekompositsiooni teoreem.
Crameri teoreem.
Järeldus
Kirjandus
VE. Schneider et al., A Short Course in Higher Mathematics, I köide, Ch. 2 lõige 1.
V.S. Štšipatšov, Kõrgem matemaatika, 10. peatükk, lõik 2.
SISSEJUHATUS
Loengus käsitletakse teise ja kolmanda järgu determinante ja nende omadusi. Ja ka Crameri teoreem, mis võimaldab determinantide abil lahendada lineaarvõrrandisüsteeme. Determinante kasutatakse ka hiljem teemas “Vektoralgebra” vektorite vektorkorrutise arvutamisel.
1. õppeküsimus TEISE JA KOLMANDA MÄÄRAJAD
TELLIMINE
Vaatleme vormi nelja numbriga tabelit
Tabelis olevad numbrid on tähistatud kahe indeksiga tähega. Esimene indeks tähistab rea numbrit, teine veeru numbrit.
MÄÄRATLUS 1. Teist järku determinant nimetatakse väljendiks nagu:
 (1)
(1)
Arve a11, ..., a22 nimetatakse determinandi elementideks.
Elementidest a11 moodustatud diagonaal; a22 nimetatakse peamiseks ja diagonaaliks, mille moodustavad a12 elemendid; a21 - pool.
Seega on teist järku determinant võrdne põhi- ja sekundaardiagonaali elementide korrutistega.
Pange tähele, et vastus on arv.
NÄITED. Arvutama:

Nüüd kaaluge üheksa numbriga tabelit, mis on kirjutatud kolmes reas ja kolmes veerus:

MÄÄRATLUS 2.Kolmandat järku determinant nimetatakse vormi väljenduseks:
Elemendid a11; a22; a33 – moodustab põhidiagonaali.
Numbrid a13; a22; a31 – moodustavad külgdiagonaali.
Kujutame skemaatiliselt, kuidas pluss- ja miinusliikmed moodustuvad:
" + " " – "
Pluss sisaldab: põhidiagonaalil olevate elementide korrutis, ülejäänud kaks liiget on põhidiagonaaliga paralleelsete alustega kolmnurkade tippudes paiknevate elementide korrutis.
Miinusliikmed moodustatakse sekundaarse diagonaali suhtes sama skeemi järgi.
Seda kolmandat järku determinandi arvutamise reeglit nimetatakse
Reegel T reugolnikov.
NÄITED. Arvutage kolmnurga reegli abil:

KOMMENTEERI. Determinante nimetatakse ka determinantideks.
2. õppeküsimus DETERMINANTIDE OMADUSED.
LAIENDATEOREEM
Omadus 1. Determinandi väärtus ei muutu, kui selle read vahetatakse vastavate veergudega.
 .
.
Mõlema determinandi paljastamisega oleme veendunud võrdsuse kehtivuses.
Omadus 1 kehtestab determinandi ridade ja veergude võrdsuse. Seetõttu sõnastame determinandi kõik edasised omadused nii ridade kui ka veergude jaoks.
Omadus 2. Kui kaks rida (või veergu) on ümber paigutatud, muudab determinant oma märgi vastupidiseks, säilitades oma absoluutväärtuse.
 .
.
Omadus 3. Rea (või veeru) elementide ühisteguri võib võtta determinandi märgist kaugemale.
 .
.
Omadus 4. Kui determinandil on kaks identset rida (või veergu), siis on see võrdne nulliga.

Seda omadust saab tõestada otsese kontrolliga või kasutada atribuuti 2.
Tähistame determinandi tähega D. Kahe identse esimese ja teise rea ümberpaigutamisel see ei muutu, kuid vastavalt teisele omadusele peab ta muutma märki, s.t.
D = - D Yu 2 D = 0 Yu D = 0.
Omadus 5. Kui rea (või veeru) kõik elemendid on võrdsed nulliga, on determinant võrdne nulliga.
Seda omadust võib pidada 3. omaduse erijuhuks, kui
Omadus 6. Kui determinandi kahe rea (või veeru) elemendid on võrdelised, siis on determinant võrdne nulliga.
 .
.
Saab tõestada otsese kontrollimise või omaduste 3 ja 4 abil.
Omadus 7. Determinandi väärtus ei muutu, kui mis tahes rea (või veeru) elementidele lisatakse teise rea (või veeru) vastavad elemendid, korrutatuna sama arvuga.
 .
.
Tõestatud otsese kontrolliga.
Nende omaduste kasutamine võib mõnel juhul hõlbustada determinantide, eriti kolmandat järku, arvutamise protsessi.
Järgneva jaoks vajame väiksema ja algebralise täienduse mõisteid. Vaatleme neid mõisteid kolmanda järjekorra määratlemiseks.
MÄÄRATLUS 3.Alaealine Kolmandat järku determinandi antud elemendist nimetatakse teist järku determinandiks, mis saadakse antud elemendist rea ja veeru läbikriipsutamise teel, mille ristumiskohas antud element asub.
Minoorelementi ai j tähistatakse Mi j-ga. Nii elemendi a11 molli jaoks

See saadakse kolmanda järgu determinandi esimese rea ja esimese veeru läbikriipsutamisel.
MÄÄRATLUS 4.Determinandi elemendi algebraline täiend nad nimetavad seda minoorseks korrutatuna (-1)k-ga, kus k on rea- ja veerunumbrite summa, mille ristumiskohas see element asub.
Elemendi ai j algebralist täiendit tähistatakse Ai j-ga.
Seega Аi j = .
Kirjutame üles algebralised liitmised elementide a11 ja a12 jaoks.
 .
.
Kasulik on meeles pidada reeglit: determinandi elemendi algebraline täiend on võrdne selle alatähtsusega plussmärgiga, kui selle rea ja veeru numbrite summa, milles element asub, on paaris ja miinusega märk, kui see summa on paaritu.
NÄIDE. Leidke determinandi esimese rea elementide mollid ja algebralised täiendid:

On selge, et mollid ja algebralised täiendid võivad erineda ainult märgi poolest.
Vaatleme ilma tõestuseta olulist teoreemi - determinandi lagunemisteoreemi.
LAIENDUSTEOREEM
Determinant on võrdne mis tahes rea või veeru elementide ja nende algebraliste täiendite korrutistega.
Seda teoreemi kasutades kirjutame esimesele reale kolmandat järku determinandi laienduse.
 .
.
Laiendatud kujul: ![]()
 .
.
Viimast valemit saab kasutada kolmandat järku determinandi arvutamisel peamise valemina.
Laiendusteoreem võimaldab taandada kolmandat järku determinandi arvutamise kolme teist järku determinandi arvutamiseks.
Dekompositsiooniteoreem annab teise võimaluse kolmandat järku determinantide arvutamiseks.
NÄITED. Arvutage determinant, kasutades laiendusteoreemi.

kasutatud laiendusi piki teist rida.
Dekompositsiooni teoreem võimaldab arvutada ka kõrgemat järku determinante, taandades need mitme kolmanda või teise järgu determinandi arvutamiseks.
Seega saab neljandat järku determinandi taandada nelja kolmandat järku determinandi arvutamiseks.
3. õppeküsimus CRAMERI TEOREEM
Rakendame vaadeldavat determinantide teooriat lineaarvõrrandisüsteemide lahendamisel.
Kahest lineaarvõrrandist koosnev süsteem kahe tundmatuga.
 (3)
(3)
Siin on x1, x2 tundmatud;
a11, ..., a22 – kahe indeksiga nummerdatud tundmatute koefitsiendid, kus esimene indeks tähendab võrrandi arvu, teine indeks aga tundmatu arvu.
b1, b2 on vabad tingimused.
Tuletagem meelde, et süsteemi (3) lahendust mõistetakse kui väärtuste paari x1, x2, mis mõlema võrrandiga asendamisel muudavad need tõelisteks võrdusteks.
Juhul, kui süsteemil on unikaalne lahendus, saab selle lahenduse leida teist järku determinantide abil.
MÄÄRATLUS 5. Nimetatakse determinanti, mis koosneb tundmatute koefitsientidest süsteemi määraja.
Tähistame süsteemi determinandi tähega D.
Determinandi D veerud sisaldavad vastavalt x1 ja x2 koefitsiente.
Toome sisse kaks täiendavat determinanti, mis saadakse süsteemi determinandist, asendades ühe veergu vabade terminite veeruga:
Vaatleme järgmist teoreemi ilma tõestuseta:
CRAMERI TEOREEM(juhul n = 2)
Kui süsteemi (3) determinant D erineb nullist (D nr 0), siis on süsteemil unikaalne lahendus, mis leitakse valemite järgi:
![]() (4)
(4)
Valemeid (4) nimetatakse Crameri valemiteks.
NÄIDE. Lahendage süsteem Crameri reegli abil.


Vastus: x1 = 3; x2 = -1
2. Kolmest lineaarvõrrandist koosnev süsteem kolme tundmatuga:
 (5)
(5)
Unikaalse lahenduse korral saab süsteemi (5) lahendada kolmandat järku determinantide abil.
Süsteemi D determinandil on järgmine kuju:

Tutvustame veel kolme determinanti:
Teoreem on sõnastatud sarnaselt.
CRAMERI TEOREEM (juhul n = 3)
Kui süsteemi (5) determinant D erineb nullist, siis on süsteemil unikaalne lahendus, mis leitakse valemite järgi:
Valemid (6) on Crameri valemid.
KOMMENTEERI. G. Cramer (1704 – 1752) – Šveitsi matemaatik.
Pange tähele, et Crameri teoreem on rakendatav, kui võrrandite arv on võrdne tundmatute arvuga ja kui süsteemi D determinant on nullist erinev.
Kui süsteemi determinant on võrdne nulliga, siis sel juhul võib süsteemil olla lahendeid või lõpmatu arv lahendeid. Neid juhtumeid uuritakse eraldi ja need leiate üksikasjalikult soovitatavast kirjandusest.
Märgime ainult ühte juhtumit:
Kui süsteemi determinant on võrdne nulliga (D = 0) ja vähemalt üks lisadeterminantidest erineb nullist, siis pole süsteemil lahendusi (st see on vastuolus).
Crameri teoreemi saab üldistada n lineaarvõrrandi süsteemiks, milles on n tundmatut.

Kui  , siis leitakse süsteemile ainuke lahendus vastavalt
, siis leitakse süsteemile ainuke lahendus vastavalt
Crameri valemid:
Täiendav kvalifikaator ![]() saadakse determinandist D, kui see sisaldab tundmatu koefitsientide veergu
saadakse determinandist D, kui see sisaldab tundmatu koefitsientide veergu
xi asendatakse vabade terminite veeruga.
Pange tähele, et determinandid D, D1, …, Dn on suurusjärgus n.
KOKKUVÕTE
Loengus vaadeldi uut mõistet - determinant ning käsitleti üksikasjalikult teist ja kolmandat järku determinante, mida praktikas sageli kohtab. Kolmandat järku determinandi jaoks on antud kaks arvutusmeetodit. Vaadeldakse Crameri teoreemi, mis annab praktilise võimaluse lineaarvõrrandisüsteemide lahendamiseks juhuks, kui lahendus on unikaalne. Lisateavet selle teema kohta saate soovitatud kirjandusest.
Sarnased kokkuvõtted:
Maatriksi ja vektori korrutise reeglid, maatriksi ja selle determinandi pöördväärtuse leidmine. Elementaarmaatriksteisendused: arvuga korrutamine, liitmine, ridade ümberpaigutamine ja kustutamine, transponeerimine. Võrrandisüsteemi lahendamine Gaussi meetodil.
Selles kokkuvõttes uuritakse teist ja kolmandat järku determinante ning tuuakse näiteid võrrandisüsteemide lahendamisest determinantmeetodi abil.
Determinandi elemendi algebralise täiendi, maatriksi, selle suuruse ja tüüpide määramine. Lineaarsete algebraliste võrrandite ebahomogeenne süsteem. Võrrandisüsteemi lahendamine Crameri meetodil. Skalaar- ja vektorsuurused, nende näited, vektori lagundamine.
Crameri meetod põhineb determinantide kasutamisel lineaarvõrrandisüsteemide lahendamisel. See kiirendab oluliselt lahendusprotsessi.
Crameri meetodi abil saab lahendada nii paljudest lineaarsetest võrranditest koosneva süsteemi kui igas võrrandis on tundmatuid. Kui süsteemi determinant ei ole võrdne nulliga, siis saab lahenduses kasutada Crameri meetodit, aga kui see on võrdne nulliga, siis mitte. Lisaks saab Crameri meetodit kasutada lineaarvõrrandisüsteemide lahendamiseks, millel on unikaalne lahendus.
Definitsioon. Tundmatute koefitsientidest koosnevat determinanti nimetatakse süsteemi determinandiks ja seda tähistatakse (delta).
Determinandid
saadakse, asendades vastavate tundmatute koefitsiendid vabade terminitega:
 ;
;
 .
.
Crameri teoreem. Kui süsteemi determinant on nullist erinev, siis on lineaarvõrrandisüsteemil üks kordumatu lahend ja tundmatu on võrdne determinantide suhtega. Nimetaja sisaldab süsteemi determinanti ja lugeja sisaldab determinanti, mis on saadud süsteemi determinandist, asendades selle tundmatu koefitsiendid vabade liikmetega. See teoreem kehtib mis tahes järku lineaarvõrrandisüsteemi kohta.
Näide 1. Lahendage lineaarvõrrandisüsteem:
Vastavalt Crameri teoreem meil on:

Niisiis, lahendus süsteemile (2):
veebikalkulaator, Crameri lahendusmeetod.
Kolm juhtumit lineaarvõrrandisüsteemide lahendamisel
Nagu selgub Crameri teoreem Lineaarvõrrandisüsteemi lahendamisel võib esineda kolm juhtumit:

Esimene juhtum: lineaarvõrrandisüsteemil on ainulaadne lahendus
(süsteem on järjekindel ja kindel)

Teine juhtum: lineaarvõrrandisüsteemil on lõpmatu arv lahendeid
(süsteem on järjekindel ja ebakindel)
** ![]() ,
,
need. tundmatute ja vabaliikmete koefitsiendid on võrdelised.

Kolmas juhtum: lineaarvõrrandisüsteemil pole lahendeid
(süsteem on ebaühtlane)
Seega süsteem m lineaarvõrrandid n nimetatakse muutujateks mitteliigeste, kui tal pole ühest lahendust ja liigend, kui sellel on vähemalt üks lahendus. Nimetatakse samaaegset võrrandisüsteemi, millel on ainult üks lahend teatud ja rohkem kui üks – ebakindel.
Näited lineaarvõrrandisüsteemide lahendamisest Crameri meetodil
Süsteem olgu antud
 .
.
Crameri teoreemi alusel
………….
,
Kus  -
-
süsteemi määraja. Ülejäänud determinandid saame, asendades veeru vastava muutuja (tundmatu) koefitsientidega vabade terminitega:


Näide 2.
 .
.
Seetõttu on süsteem kindel. Selle lahenduse leidmiseks arvutame determinandid


Crameri valemeid kasutades leiame:
![]()
Seega on (1; 0; -1) süsteemi ainus lahendus.
Võrrandisüsteemide 3 x 3 ja 4 x 4 lahenduste kontrollimiseks võite kasutada veebikalkulaatorit, kasutades Crameri lahendusmeetodit.
Kui lineaarvõrrandisüsteemis ei ole ühes või mitmes võrrandis muutujaid, siis determinandis on vastavad elemendid võrdsed nulliga! See on järgmine näide.
Näide 3. Lahendage Crameri meetodil lineaarvõrrandisüsteem:
 .
.
Lahendus. Leiame süsteemi determinandi:

Vaadake hoolikalt võrrandisüsteemi ja süsteemi determinanti ning korrake vastust küsimusele, millistel juhtudel on determinandi üks või mitu elementi võrdsed nulliga. Seega ei ole determinant võrdne nulliga, seega on süsteem kindel. Selle lahenduse leidmiseks arvutame tundmatute determinandid


Crameri valemeid kasutades leiame:
Seega on süsteemi lahendus (2; -1; 1).
Võrrandisüsteemide 3 x 3 ja 4 x 4 lahenduste kontrollimiseks võite kasutada veebikalkulaatorit, kasutades Crameri lahendusmeetodit.
Lehe ülaosa
Jätkame koos Crameri meetodil süsteemide lahendamist
Nagu juba mainitud, kui süsteemi determinant on võrdne nulliga ja tundmatute determinandid ei ole nulliga, on süsteem ebajärjekindel, see tähendab, et tal pole lahendusi. Illustreerime seda järgmise näitega.
Näide 6. Lahendage Crameri meetodil lineaarvõrrandisüsteem:

Lahendus. Leiame süsteemi determinandi:
Süsteemi determinant on võrdne nulliga, seetõttu on lineaarvõrrandisüsteem kas ebajärjekindel ja kindel või vastuoluline, see tähendab, et sellel pole lahendusi. Selguse huvides arvutame determinandid tundmatute jaoks



Tundmatute determinandid ei ole võrdsed nulliga, seetõttu on süsteem ebajärjekindel, st tal pole lahendusi.
Võrrandisüsteemide 3 x 3 ja 4 x 4 lahenduste kontrollimiseks võite kasutada veebikalkulaatorit, kasutades Crameri lahendusmeetodit.
Lineaarvõrrandisüsteeme hõlmavates ülesannetes on ka selliseid, kus lisaks muutujaid tähistavatele tähtedele on ka teisi tähti. Need tähed tähistavad numbrit, enamasti päris. Praktikas viivad otsinguprobleemid selliste võrrandite ja võrrandisüsteemideni üldised omadused mis tahes nähtused või objektid. See tähendab, kas olete mõne välja mõelnud uus materjal või seadet ning selle omaduste kirjeldamiseks, mis on levinud olenemata eksemplari suurusest või arvust, tuleb lahendada lineaarvõrrandi süsteem, kus muutujate mõne koefitsiendi asemel on tähed. Näiteid ei pea kaugelt otsima.
Järgmine näide on sarnase ülesande jaoks, suureneb ainult teatud reaalarvu tähistavate võrrandite, muutujate ja tähtede arv.
Näide 8. Lahendage Crameri meetodil lineaarvõrrandisüsteem:

Lahendus. Leiame süsteemi determinandi:

Tundmatute määrajate leidmine
MAATRIKSID, DETERMINANTID, LINEAARVÕRDENDITE SÜSTEEMID
MAATRIKS MÄÄRATLUS. MAATRIKSIDE LIIGIDMaatriks suurusega m× n nimetatakse komplektiks m·n numbrid on paigutatud ristkülikukujulisse tabelisse m read ja n veerud. See tabel on tavaliselt sulgudes. Näiteks võib maatriks välja näha selline:Lühiduse huvides võib maatriksi tähistada ühega suur algustäht, Näiteks, A või IN.IN üldine vaade maatriksi suurus m× n kirjuta see nii
 .
.
Maatriksi moodustavaid numbreid nimetatakse maatriksi elemendid. Maatrikselemendid on mugav varustada kahe indeksiga a ij: esimene tähistab rea numbrit ja teine veeru numbrit. Näiteks, a 23 – element asub 2. reas, 3. veerus. Kui maatriksi ridade arv on võrdne veergude arvuga, siis maatriksi nn. ruut, ja kutsutakse selle ridade või veergude arv korras maatriksid. Ülaltoodud näidetes on teine maatriks ruut - selle järjekord on 3 ja neljas maatriks on järjekord 1. Maatriksit, milles ridade arv ei võrdu veergude arvuga, nimetatakse ristkülikukujuline. Näidetes on see esimene maatriks ja kolmas.On ka maatrikseid, millel on ainult üks rida või üks veerg Maatriksit, millel on ainult üks rida, nimetatakse maatriks - rida(või string) ja ainult ühe veeruga maatriks maatriks - veerg.Nimetatakse maatriks, mille kõik elemendid on võrdsed nulliga null ja seda tähistatakse (0) või lihtsalt 0-ga. Näiteks
 .
.
Kutsutakse ruutmaatriksit, milles kõik põhidiagonaalist allpool olevad elemendid on võrdsed nulliga kolmnurkne maatriks.
 .
.
Ruutmaatriksit, milles kõik elemendid, välja arvatud ehk põhidiagonaalil olevad elemendid, on võrdsed nulliga, nimetatakse diagonaal maatriks. Näiteks või . Kutsutakse diagonaalmaatriksit, mille kõik diagonaalelemendid on võrdsed ühega vallaline maatriks ja seda tähistatakse tähega E. Näiteks 3. järku identiteedimaatriksil on vorm  .TEGEVUSED MAATRIKSIDEGAMaatriksi võrdsus. Kaks maatriksit A Ja B nimetatakse võrdseks, kui neil on sama arv ridu ja veerge ning nende vastavad elemendid on võrdsed a ij = b ij. Nii et kui
.TEGEVUSED MAATRIKSIDEGAMaatriksi võrdsus. Kaks maatriksit A Ja B nimetatakse võrdseks, kui neil on sama arv ridu ja veerge ning nende vastavad elemendid on võrdsed a ij = b ij. Nii et kui  Ja
Ja  , See A=B, Kui a 11
= b 11
, a 12
= b 12
, a 21
= b 21
Ja a 22
= b 22
.Transponeerida. Mõelge suvalisele maatriksile A alates m read ja n veerud. Seda saab seostada järgmise maatriksiga B alates n read ja m veerud, milles iga rida on maatriksi veerg A sama numbriga (seega on iga veerg maatriksi rida A sama numbriga). Nii et kui
, See A=B, Kui a 11
= b 11
, a 12
= b 12
, a 21
= b 21
Ja a 22
= b 22
.Transponeerida. Mõelge suvalisele maatriksile A alates m read ja n veerud. Seda saab seostada järgmise maatriksiga B alates n read ja m veerud, milles iga rida on maatriksi veerg A sama numbriga (seega on iga veerg maatriksi rida A sama numbriga). Nii et kui  , See
, See  .See maatriks B helistas üle võetud maatriks A ja üleminek alates A To B ülevõtmine Seega on transpositsioon maatriksi ridade ja veergude rollide muutumine. Maatriks maatriksiks transponeeritud A, tavaliselt tähistatud A T.Maatriksi vaheline seos A ja selle transponeerimise saab kirjutada kujul . Näiteks. Leia antud maatriks, mis on transponeeritud.
.See maatriks B helistas üle võetud maatriks A ja üleminek alates A To B ülevõtmine Seega on transpositsioon maatriksi ridade ja veergude rollide muutumine. Maatriks maatriksiks transponeeritud A, tavaliselt tähistatud A T.Maatriksi vaheline seos A ja selle transponeerimise saab kirjutada kujul . Näiteks. Leia antud maatriks, mis on transponeeritud.  Maatriksi lisamine. Lase maatriksitel A Ja B koosneb sama number ridu ja sama palju veerge, st. on samad suurused
. Siis maatriksite lisamiseks A Ja B vaja maatrikselementide jaoks A lisada maatrikselemente B seisab samadel kohtadel. Seega kahe maatriksi summa A Ja B nimetatakse maatriksiks C, mis on määratud reegliga, näiteks
Maatriksi lisamine. Lase maatriksitel A Ja B koosneb sama number ridu ja sama palju veerge, st. on samad suurused
. Siis maatriksite lisamiseks A Ja B vaja maatrikselementide jaoks A lisada maatrikselemente B seisab samadel kohtadel. Seega kahe maatriksi summa A Ja B nimetatakse maatriksiks C, mis on määratud reegliga, näiteks
![]()
 Lihtne on kontrollida, kas maatriksi liitmine järgib järgmisi seadusi: kommutatiivne A+B=B+A ja assotsiatiivne ( A+B)+C=A+(B+C).Maatriksi korrutamine arvuga. Maatriksi korrutamiseks A numbri kohta k maatriksi iga elementi on vaja A korrutage selle arvuga. Seega maatrikskorrutis A numbri kohta k on uus maatriks, mis määratakse reegliga
Lihtne on kontrollida, kas maatriksi liitmine järgib järgmisi seadusi: kommutatiivne A+B=B+A ja assotsiatiivne ( A+B)+C=A+(B+C).Maatriksi korrutamine arvuga. Maatriksi korrutamiseks A numbri kohta k maatriksi iga elementi on vaja A korrutage selle arvuga. Seega maatrikskorrutis A numbri kohta k on uus maatriks, mis määratakse reegliga  või .Suvaliste numbrite puhul a Ja b ja maatriksid A Ja B kehtivad järgmised võrdsused:
või .Suvaliste numbrite puhul a Ja b ja maatriksid A Ja B kehtivad järgmised võrdsused:  .
.  Maatriks C ei leia, sest maatriksid A Ja B on erineva suurusega. Maatrikskorrutis. See operatsioon viiakse läbi vastavalt omapärasele seadusele. Kõigepealt märgime, et faktorimaatriksite suurused peavad olema järjepidevad. Korrutada saab ainult neid maatrikseid, milles esimese maatriksi veergude arv langeb kokku teise maatriksi ridade arvuga (st esimese rea pikkus võrdub teise veeru kõrgusega). Töö maatriksid A mitte maatriks B nimetatakse uueks maatriksiks C=AB, mille elemendid koosnevad järgmiselt:
Maatriks C ei leia, sest maatriksid A Ja B on erineva suurusega. Maatrikskorrutis. See operatsioon viiakse läbi vastavalt omapärasele seadusele. Kõigepealt märgime, et faktorimaatriksite suurused peavad olema järjepidevad. Korrutada saab ainult neid maatrikseid, milles esimese maatriksi veergude arv langeb kokku teise maatriksi ridade arvuga (st esimese rea pikkus võrdub teise veeru kõrgusega). Töö maatriksid A mitte maatriks B nimetatakse uueks maatriksiks C=AB, mille elemendid koosnevad järgmiselt: Näiteks toote saamiseks (st maatriksis C) element, mis asub 1. reas ja 3. veerus c 13 , peate võtma 1. maatriksi 1. rea, 2. maatriksi 3. veeru ja seejärel korrutama rea elemendid vastava veeru elementidega ja liitma saadud korrutised. Ja muud korrutismaatriksi elemendid saadakse esimese maatriksi ridade ja teise maatriksi veergude sarnase korrutise abil. üldine juhtum, kui maatriksi korrutada A = (a ij ) suurus m× n maatriksile B = (b ij ) suurus n× lk, siis saame maatriksi C suurus m× lk, mille elemendid arvutatakse järgmiselt: element c ij saadakse elementide korrutise tulemusena i maatriksi rida A vastavatele elementidele j maatriksi veerus B ja nende liitmised.Sellest reeglist järeldub, et alati saab korrutada kaks sama järku ruutmaatriksit, mille tulemusena saame sama järgu ruutmaatriksi. Eelkõige saab ruutmaatriksit alati korrutada iseendaga, s.t. ruut.Teine oluline juhtum on reamaatriksi korrutamine veerumaatriksiga ja esimese laius peab olema võrdne teise kõrgusega, mille tulemuseks on esimest järku maatriks (st üks element). Tõesti,
 .
.
 Otsige elemente c 12
, c 23
Ja c 21
maatriksid C.
Otsige elemente c 12
, c 23
Ja c 21
maatriksid C. - Leidke maatriksite korrutis.
 .
.  Otsi AB Ja VA.
Otsi AB Ja VA. 
 Otsi AB Ja VA. , B·A- pole mõtet. Seega need lihtsaid näiteid näitavad, et maatriksid üldiselt ei pendelda omavahel, st. A∙B
≠
B∙A
. Seetõttu tuleb maatriksite korrutamisel hoolikalt jälgida tegurite järjekorda Saate kontrollida, kas maatriksite korrutamine järgib assotsiatiivseid ja distributiivseid seadusi, s.t. (AB)C=A(BC) Ja (A+B)C=AC+BC.Seda on lihtne kontrollida ka ruutmaatriksi korrutamisel A identiteedimaatriksisse E samas järjekorras saame taas maatriksi A ja AE=EA=A Märkida võib järgmist huvitavat fakti. Teatavasti ei võrdu 2 nullist erineva arvu korrutis 0-ga. Maatriksite puhul ei pruugi see nii olla, s.t. 2 nullist erineva maatriksi korrutis võib osutuda võrdseks nullmaatriksiga. Näiteks, Kui
Otsi AB Ja VA. , B·A- pole mõtet. Seega need lihtsaid näiteid näitavad, et maatriksid üldiselt ei pendelda omavahel, st. A∙B
≠
B∙A
. Seetõttu tuleb maatriksite korrutamisel hoolikalt jälgida tegurite järjekorda Saate kontrollida, kas maatriksite korrutamine järgib assotsiatiivseid ja distributiivseid seadusi, s.t. (AB)C=A(BC) Ja (A+B)C=AC+BC.Seda on lihtne kontrollida ka ruutmaatriksi korrutamisel A identiteedimaatriksisse E samas järjekorras saame taas maatriksi A ja AE=EA=A Märkida võib järgmist huvitavat fakti. Teatavasti ei võrdu 2 nullist erineva arvu korrutis 0-ga. Maatriksite puhul ei pruugi see nii olla, s.t. 2 nullist erineva maatriksi korrutis võib osutuda võrdseks nullmaatriksiga. Näiteks, Kui  , See
, See ![]() .
.
 Seega tuleb teist järku determinandi leidmiseks lahutada põhidiagonaali elementide korrutisest piki teist diagonaali elementide korrutis. Näited. Arvutage teist järku determinandid.
Seega tuleb teist järku determinandi leidmiseks lahutada põhidiagonaali elementide korrutisest piki teist diagonaali elementide korrutis. Näited. Arvutage teist järku determinandid. 
Samamoodi võime käsitleda kolmandat järku maatriksit ja sellele vastavat determinanti. Kolmandat järku determinant, mis vastab antud kolmandat järku ruutmaatriksile, on arv, mida tähistatakse ja saadakse järgmiselt:
 .
.
Seega annab see valem kolmandat järku determinandi laienduse esimese rea elementide suhtes a 11
, a 12
, a 13
ja taandab kolmanda järgu determinandi arvutamise teist järku determinantide arvutamiseks. Näited. Arvutage kolmandat järku determinant.  . (x+3)(4x-4-3x)+4(3x-4x+4)=0. (x+3)(x-4)+4(-x+4)=0. (x-4)(x-1)=0. x 1
= 4, x 2
= 1. Samamoodi saate tutvustada neljanda, viienda jne determinantide mõisteid. järjestused, alandades nende järjekorda, laienedes 1. rea elementidele, kusjuures terminite märgid "+" ja "-" vahelduvad. Seega erinevalt maatriksist, mis on arvude tabel, on determinant arv, mis on panna kirjavahetusse teatud viisil maatriksisse.
. (x+3)(4x-4-3x)+4(3x-4x+4)=0. (x+3)(x-4)+4(-x+4)=0. (x-4)(x-1)=0. x 1
= 4, x 2
= 1. Samamoodi saate tutvustada neljanda, viienda jne determinantide mõisteid. järjestused, alandades nende järjekorda, laienedes 1. rea elementidele, kusjuures terminite märgid "+" ja "-" vahelduvad. Seega erinevalt maatriksist, mis on arvude tabel, on determinant arv, mis on panna kirjavahetusse teatud viisil maatriksisse.
DETERMINANTIDE OMADUSED
 Tõestus teostatakse taatlemisega, s.o. kirjaliku võrdsuse mõlema poole võrdlemisega. Arvutame determinandid vasakul ja paremal:
Tõestus teostatakse taatlemisega, s.o. kirjaliku võrdsuse mõlema poole võrdlemisega. Arvutame determinandid vasakul ja paremal: 
- Kahe rea või veeru ümberkorraldamisel muudab determinant oma märgi vastupidiseks, säilitades absoluutväärtuse, s.t.
Kolmandat järku determinandi puhul kontrollige seda ise.  Tõepoolest, kui siin 2. ja 3. rida ümber paigutada, siis omaduse 2 järgi peaks see determinant märki muutma, kuid determinant ise on sel juhul ei muutu, st. saame | A| = –|A| või | A| = 0.
Tõepoolest, kui siin 2. ja 3. rida ümber paigutada, siis omaduse 2 järgi peaks see determinant märki muutma, kuid determinant ise on sel juhul ei muutu, st. saame | A| = –|A| või | A| = 0.  Tõestus viiakse läbi kontrollimise teel, nagu atribuut 1. (Iseseisvalt)
Tõestus viiakse läbi kontrollimise teel, nagu atribuut 1. (Iseseisvalt)
- Kui determinandi mis tahes rea või veeru kõik elemendid on võrdsed nulliga, on determinant ise võrdne nulliga. (Tõend kontrollimisega). Kui determinandi mis tahes rea või veeru kõik elemendid on esitatud 2 liikme summana, saab determinandi esitada 2 determinandi summana, kasutades valemit, näiteks:
 .
.
- Kui mõnele determinandi reale (või veerule) liidame teise rea (või veeru) vastavad elemendid, korrutatuna sama arvuga, siis determinant oma väärtust ei muuda. Näiteks,
 . Tõestame seda võrdsust determinandi eelnevate omaduste abil.
. Tõestame seda võrdsust determinandi eelnevate omaduste abil.  Neid determinantide omadusi kasutatakse üsna sageli determinantide arvutamisel ja mitmesugustes ülesannetes. ALGEBRAALISED TÄIENDUSED JA ALAALANE Olgu meil kolmandat järku determinant:
Neid determinantide omadusi kasutatakse üsna sageli determinantide arvutamisel ja mitmesugustes ülesannetes. ALGEBRAALISED TÄIENDUSED JA ALAALANE Olgu meil kolmandat järku determinant:  .Alaealine, mis vastab sellele elemendile a ij kolmandat järku determinandiks nimetatakse teist järku determinandi, mis saadakse antud determinandist, kustutades rea ja veeru, mille ristumiskohas antud element seisab, s.t. i-th rida ja j veerus. Minorid, mis vastavad antud elemendile a ij me tähistame M ij .Näiteks, alaealine M 12
, mis vastab elemendile a 12
, saab olema määraja
.Alaealine, mis vastab sellele elemendile a ij kolmandat järku determinandiks nimetatakse teist järku determinandi, mis saadakse antud determinandist, kustutades rea ja veeru, mille ristumiskohas antud element seisab, s.t. i-th rida ja j veerus. Minorid, mis vastavad antud elemendile a ij me tähistame M ij .Näiteks, alaealine M 12
, mis vastab elemendile a 12
, saab olema määraja  , mis saadakse antud determinandist 1. rea ja 2. veeru kustutamisel Seega näitab kolmandat järku determinandi defineeriv valem, et see determinant on võrdne 1. rea elementide ja neile vastavate minooride korrutistega ; sel juhul elemendile vastav moll a 12
, võetakse “–” märgiga, st. me võime seda kirjutada
, mis saadakse antud determinandist 1. rea ja 2. veeru kustutamisel Seega näitab kolmandat järku determinandi defineeriv valem, et see determinant on võrdne 1. rea elementide ja neile vastavate minooride korrutistega ; sel juhul elemendile vastav moll a 12
, võetakse “–” märgiga, st. me võime seda kirjutada On lihtne näha, et kasutades elementide algebralisi liitmisi, saab valemi (1) kirjutada kujul:. Sarnaselt selle valemiga on võimalik saada determinandi laiendamine mis tahes rea või veeru elementideks. Näiteks determinandi laiendamise 2. rea elementideks saab järgmiselt. Determinandi omaduse 2 järgi on meil:  Laiendame saadud determinandi 1. rea elementideks.
Laiendame saadud determinandi 1. rea elementideks.
|
|
 .
. sest teist järku determinandid valemis (2) on elementide alaealised a 21
, a 22
, a 23
. Seega, st. oleme saanud determinandi laienduse 2. rea elementideks Samamoodi saame determinandi laienduse kolmanda rea elementideks. Kasutades determinantide omadust 1 (transpositsiooni kohta), saame näidata, et sarnased laiendused kehtivad ka veergude elementide kaupa laiendamisel, seega kehtib järgmine teoreem. Teoreem (determinandi laiendamise kohta üle antud rea või veeru). Determinant on võrdne tema mis tahes rea (või veeru) elementide ja nende algebraliste täiendite korrutistega Kõik eelnev kehtib ka mis tahes kõrgemat järku determinantide kohta. Näited.
sest teist järku determinandid valemis (2) on elementide alaealised a 21
, a 22
, a 23
. Seega, st. oleme saanud determinandi laienduse 2. rea elementideks Samamoodi saame determinandi laienduse kolmanda rea elementideks. Kasutades determinantide omadust 1 (transpositsiooni kohta), saame näidata, et sarnased laiendused kehtivad ka veergude elementide kaupa laiendamisel, seega kehtib järgmine teoreem. Teoreem (determinandi laiendamise kohta üle antud rea või veeru). Determinant on võrdne tema mis tahes rea (või veeru) elementide ja nende algebraliste täiendite korrutistega Kõik eelnev kehtib ka mis tahes kõrgemat järku determinantide kohta. Näited. 
- Arvutage determinant, kasutades selle omadusi. Enne determinandi laiendamist mis tahes rea elementideks, taandades selle kolmandat järku determinantideks, teisendame selle omaduse 7 abil, muutes kõik elemendid mis tahes reas või veerus, välja arvatud üks, võrdne nulliga. Sel juhul on mugav kaaluda 4. veergu või 4. rida:

PÖÖRDMAATRIKS
Pöördmaatriksi mõiste võetakse kasutusele ainult selleks ruutmaatriksid.Kui A on siis ruutmaatriks tagurpidi selle jaoks on maatriks maatriks, tähistatud A -1 ja tingimuse rahuldamine. (See definitsioon võetakse kasutusele analoogia põhjal arvude korrutamisega) Kehtib järgmine teoreem: Teoreem. Selleks, et ruutmaatriks A oli pöördväärtus, on vajalik ja piisav, et selle determinant erineks nullist. Tõestus:- Vajadus. Lase maatriksi jaoks A on pöördmaatriks A -1
. Näitame, et | A| ≠ 0.
 Näitame, et sel juhul on maatriks pöördmaatriks
Näitame, et sel juhul on maatriks pöördmaatriks  , Kus A ij elemendi algebraline täiend a ij. Otsime üles AB=C. Pange tähele, et kõik maatriksi diagonaalsed elemendid C on võrdne 1-ga. Näiteks
, Kus A ij elemendi algebraline täiend a ij. Otsime üles AB=C. Pange tähele, et kõik maatriksi diagonaalsed elemendid C on võrdne 1-ga. Näiteks Samamoodi saab determinandi stringi elementideks laiendamise teoreemi kasutades tõestada, et c 22
= c 33
= 1. Lisaks kõik maatriksi mittediagonaalsed elemendid C on võrdsed nulliga. Näiteks,  Seega AB=E. Samamoodi võib näidata, et BA=E. Sellepärast B=A -1
.Seega sisaldab teoreem meetodit pöördmaatriksi leidmiseks. Kui teoreemi tingimused on täidetud, siis leitakse maatriksiga pöördmaatriks järgmiselt
Seega AB=E. Samamoodi võib näidata, et BA=E. Sellepärast B=A -1
.Seega sisaldab teoreem meetodit pöördmaatriksi leidmiseks. Kui teoreemi tingimused on täidetud, siis leitakse maatriksiga pöördmaatriks järgmiselt
 ,
,
Kus A ij- elementide algebraline liitmine a ij antud maatriks A.Niisiis vajaliku pöördmaatriksi leidmiseks: Sarnaselt teist järku maatriksite puhul on pöördmaatriksiks järgmine maatriks  .Näited. |A| = 2. Leia maatriksi elementide algebralised täiendid A.
.Näited. |A| = 2. Leia maatriksi elementide algebralised täiendid A.  Eksam:
Eksam:  . Samamoodi A∙A -1
= E.
. Samamoodi A∙A -1
= E.  . Arvutame | A| = 4. Siis
. Arvutame | A| = 4. Siis ![]() .
. ![]() .
. 

LINEAARVÕRRANDITE SÜSTEEMID
M lineaarvõrrandi süsteem n tundmatuga nimetatakse vormisüsteemiks
Kus a ij Ja b i (i=1,…,m; b=1,…,n) - mõned teadaolevad numbrid, A x 1 ,…,x n- teadmata. Koefitsientide määramisel a ij esimene indeks i tähistab võrrandi numbrit ja teist j– tundmatute arv, mille juures see koefitsient seisab. Tundmatute koefitsiendid kirjutame maatriksi kujul, mida nimetame süsteemi maatriks.Võrrandite paremal küljel olevad arvud on b 1 ,…,b m kutsutakse tasuta liikmed. Totaalsus n numbrid c 1 ,…,c n helistas otsus antud süsteemist, kui süsteemi iga võrrand muutub pärast arvude asendamist võrduseks c 1 ,…,c n vastavate tundmatute asemel x 1 ,…,x n.Meie ülesandeks jääb süsteemile lahenduste leidmine. Sel juhul võib tekkida kolm olukorda: Lineaarvõrrandisüsteemi, millel on vähemalt üks lahend, nimetatakse liigend. Vastasel juhul, st. kui süsteemil pole lahendusi, siis kutsutakse seda mitteliigeste Vaatleme võimalusi süsteemile lahenduste leidmiseks. MAATRIKS-MEETOD LINEAARSÜSTEEMIDE LAHENDAMISEKS Maatriksid võimaldavad lühidalt kirja panna lineaarvõrrandisüsteemi. Olgu antud 3 võrrandi süsteem kolme tundmatuga:

Mõelge süsteemimaatriksile  ja maatriksite veerud tundmatutest ja vabadest terminitest
ja maatriksite veerud tundmatutest ja vabadest terminitest  Otsime töö üles
Otsime töö üles

need. korrutise tulemusena saame selle süsteemi võrrandite vasakpoolsed küljed. Seejärel saab selle süsteemi maatriksvõrdsuse definitsiooni kasutades kirjutada kujule  või lühem A∙X = B.Siin on maatriksid A Ja B on teada ja maatriks X teadmata. See on vajalik üles leida, sest... selle elemendid on selle süsteemi lahendus. Seda võrrandit nimetatakse maatriksvõrrand.Olgu maatriksi determinant nullist erinev | A| ≠ 0. Seejärel lahendatakse maatriksvõrrand järgmiselt. Korrutage vasakpoolse võrrandi mõlemad pooled maatriksiga A -1
, maatriksi pöördväärtus A: . Kuna A -1
A=E Ja E∙X = X, siis leiame lahenduse maatriksvõrrand nagu X = A
-1
B
Pange tähele, et kuna pöördmaatriksit saab leida ainult ruutmaatriksite jaoks, saab maatriksmeetodiga lahendada ainult need süsteemid, milles võrrandite arv langeb kokku tundmatute arvuga. Süsteemi maatrikssalvestus on aga võimalik ka juhul, kui võrrandite arv ei võrdu tundmatute arvuga, siis maatriks A ei saa olema ruudukujuline ja seetõttu on vormis võimatu süsteemile lahendust leida X = A -1
B.Näited. Lahendage võrrandisüsteeme.
või lühem A∙X = B.Siin on maatriksid A Ja B on teada ja maatriks X teadmata. See on vajalik üles leida, sest... selle elemendid on selle süsteemi lahendus. Seda võrrandit nimetatakse maatriksvõrrand.Olgu maatriksi determinant nullist erinev | A| ≠ 0. Seejärel lahendatakse maatriksvõrrand järgmiselt. Korrutage vasakpoolse võrrandi mõlemad pooled maatriksiga A -1
, maatriksi pöördväärtus A: . Kuna A -1
A=E Ja E∙X = X, siis leiame lahenduse maatriksvõrrand nagu X = A
-1
B
Pange tähele, et kuna pöördmaatriksit saab leida ainult ruutmaatriksite jaoks, saab maatriksmeetodiga lahendada ainult need süsteemid, milles võrrandite arv langeb kokku tundmatute arvuga. Süsteemi maatrikssalvestus on aga võimalik ka juhul, kui võrrandite arv ei võrdu tundmatute arvuga, siis maatriks A ei saa olema ruudukujuline ja seetõttu on vormis võimatu süsteemile lahendust leida X = A -1
B.Näited. Lahendage võrrandisüsteeme.  Leiame maatriksi pöördväärtuse A. ,
Leiame maatriksi pöördväärtuse A. ,  Seega x = 3, y = – 1.
Seega x = 3, y = – 1.  Niisiis, X 1 =4,X 2 =3,X 3 =5.
Niisiis, X 1 =4,X 2 =3,X 3 =5. ![]() Avaldame nõutava maatriksi X antud võrrandist.
Avaldame nõutava maatriksi X antud võrrandist.  Leiame maatriksi A -1 .
Leiame maatriksi A -1 .  Eksam:
Eksam:  Võrrandist saame
Võrrandist saame ![]() .
.  Seega
Seega ![]() CRAMERI REEGEL Vaatleme kolmest lineaarsest võrrandist koosnevat süsteemi kolme tundmatuga:
CRAMERI REEGEL Vaatleme kolmest lineaarsest võrrandist koosnevat süsteemi kolme tundmatuga:
Süsteemi maatriksile vastav kolmandat järku determinant, s.o. koosneb tundmatute koefitsientidest,
helistas süsteemi määraja Koostame veel kolm determinanti järgmiselt: asendame järjestikku 1, 2 ja 3 veergu determinandis D vabade liikmete veeruga

Siis saame tõestada järgmise tulemuse. Teoreem (Crameri reegel). Kui süsteemi determinant Δ ≠ 0, siis on vaadeldaval süsteemil üks ja ainult üks lahend ning
![]()

Lisame need võrrandid:
Vaatame iga sulgu ja parem pool see võrrand. Determinandi laienemise teoreemi järgi 1. veeru elementides
Samamoodi saab näidata, et ja . Lõpuks on seda lihtne märgata  Seega saame võrdsuse: .Siit, .Sarnaselt tuletatakse võrdsused ja, millest järeldub teoreemi väide Seega märgime, et kui süsteemi determinant Δ ≠ 0, siis on süsteemil unikaalne lahend ja vastupidi. Kui süsteemi determinant on võrdne nulliga, siis süsteemil on kas lõpmatu arv lahendeid või puuduvad lahendid, s.t. Sobimatu. Näited. Lahenda võrrandisüsteem
Seega saame võrdsuse: .Siit, .Sarnaselt tuletatakse võrdsused ja, millest järeldub teoreemi väide Seega märgime, et kui süsteemi determinant Δ ≠ 0, siis on süsteemil unikaalne lahend ja vastupidi. Kui süsteemi determinant on võrdne nulliga, siis süsteemil on kas lõpmatu arv lahendeid või puuduvad lahendid, s.t. Sobimatu. Näited. Lahenda võrrandisüsteem  Niisiis, X=1, juures=2, z=3.
Niisiis, X=1, juures=2, z=3. ![]() Süsteemil on ainulaadne lahendus, kui Δ ≠ 0.
Süsteemil on ainulaadne lahendus, kui Δ ≠ 0. ![]() . Sellepärast . GAUSS MEETOD Eelnevalt käsitletud meetoditega saab lahendada ainult neid süsteeme, milles võrrandite arv ühtib tundmatute arvuga ning süsteemi determinant peab olema erinev nullist. Gaussi meetod on universaalsem ja sobib suvalise arvu võrranditega süsteemidele. See seisneb tundmatute järjestikuses eemaldamises süsteemi võrranditest. Vaatleme veel kord kolmest võrrandist koosnevat süsteemi kolme tundmatuga:
. Sellepärast . GAUSS MEETOD Eelnevalt käsitletud meetoditega saab lahendada ainult neid süsteeme, milles võrrandite arv ühtib tundmatute arvuga ning süsteemi determinant peab olema erinev nullist. Gaussi meetod on universaalsem ja sobib suvalise arvu võrranditega süsteemidele. See seisneb tundmatute järjestikuses eemaldamises süsteemi võrranditest. Vaatleme veel kord kolmest võrrandist koosnevat süsteemi kolme tundmatuga:
 .
.